Aakash iACST Scholarship Test 2024
ApplyGet up to 90% scholarship on NEET, JEE & Foundation courses
Access premium articles, webinars, resources to make the best decisions for career, course, exams, scholarships, study abroad and much more with
Plan, Prepare & Make the Best Career Choices
NCERT Solutions for Class 11 Physics Chapter 7 System Of Particles And Rotational Motion are considered to be both highly important and challenging within the Class 11 NCERT syllabus. On this particular page of Careers360, you will find comprehensive class 11 physics chapter 7 exercise solutions, meticulously crafted by subject experts. These NCERT Solutions intricately elucidate each step in a simplified manner, making the understanding of this complex topic more accessible. The physics class 11 chapter 7 NCERT solutions encompass a total of thirty-three questions, spanning from 7.1 to 7.21 in the exercise questions section, and from 7.22 to 7.33 in the additional exercise section.
JEE Main Scholarship Test Kit (Class 11): Narayana | Physics Wallah | Aakash | Unacademy
NEET Scholarship Test Kit (Class 11): Narayana | Physics Wallah | Aakash | ALLEN
Suggested: JEE Main: high scoring chapters | Past 10 year's papers
New: Aakash iACST Scholarship Test. Up to 90% Scholarship. Register Now
ch 7 class 11 physics System of particles and rotational motion is part of Ncert solution for class 11 physics . The chapter starts with the concepts of the rigid body. In the solutions of NCERT Cass 11 physics chapter 7 System of Particles and Rotational Motion, a detailed explanation of answers is given by considering the bodies to be rigid. Ideally speaking a rigid body is a body with a perfectly definite and unaltering shape. The distance between all pairs of particles of such a body does not change. According to this definition, the bodies that we see in our real life are not rigid because they will deform when a force is applied. But when this deformation is negligible we consider the bodies as rigid.
The CBSE NCERT solutions for Class 11 Physics Chapter 7 System of Particles and Rotational Motion are important as far as board and competitive exams are considered. The two main topics that we come across in NCERT are the moment of inertia and the centre of mass. There are questions and answers based on these topics in the NCERT solutions for Class 11 Physics Chapter 7 system of particles and rotational motion. NCERT solutions for class 11 physics chapter 7 pdf help students in self-study and score good marks in exams.
NCERT Solutions for Class 11 Physics Chapter 7 pdf download for free.
**According to the CBSE Syllabus for the academic year 2023-24, the chapter you previously referred to as Chapter 7, " System of particles and rotational motion," has been renumbered as Chapter 6.
Answer:
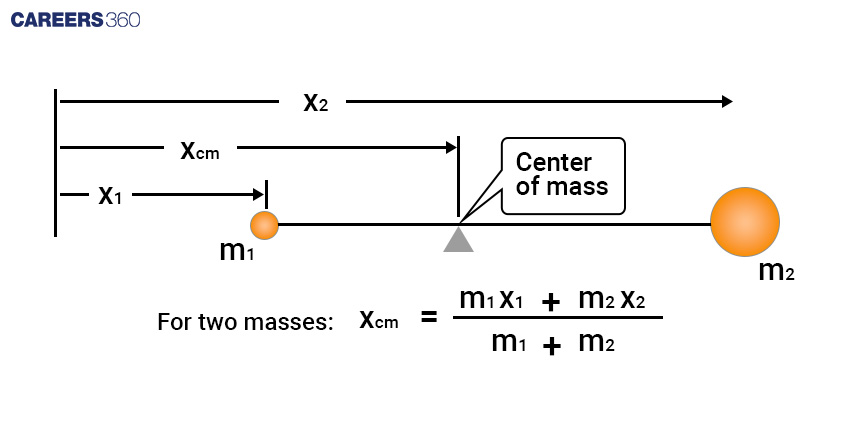
For uniform mass density, the location of the centre of mass is the same as that of the geometric centre.
No, it is not necessary that the centre of mass lies inside the body. For example in the case of a ring the centre of mass outside the body.
Answer:
Let us assume that the centre of mass of the molecule is x cm away from the chlorine atom.
So, we can write
or
Here negative sign indicates that the centre of mass lies leftward of the chlorine atom.
Answer:
Since child and trolley are considered in a system thus speed of the centre of mass change only when an external force will act on the system. When the child starts to move on the trolley the force produced is the internal force of the system so this will produce no change in the velocity of the CM.
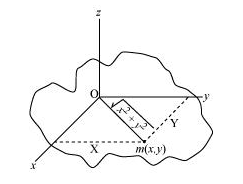
Q7.4 Show that the area of the triangle contained between the vectors is one half of the magnitude of
.
Answer:
Let a and b be two vectors having angle between them.
Consider MON,
or
or
= 2 (Area of MOK)
Therefore the area of MOK = One half of
.
Answer:
A parallelepiped is shown in the figure given below:-
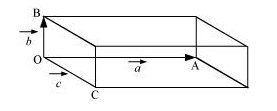
Volume is given by : = abc
We can write :
(The direction of
is in the direction of vector a.)
Now,
This is equal to volume of parallelepiped.
Q7.6 Find the components along the axes of the angular momentum
of a particle, whose position vector is
with components
and momentum is
with components
,
and
. Show that if the particle moves only in the
plane the angular momentum has only a z-component.
Answer:
Linear momentum of particle is given by :
And the angular momentum is :
When particle is confined to x-y plane then z = 0 and p z = 0.
When we put the value of z and p z in the equation of linear momentum then we observe that only the z component is non-zero.
Answer:
Assume two points (say A, B) separated by distance d.
So the angular momentum of a point about point A is given by :
And about point B :
Now assume a point between A and B as C which is at y distance from point B.
Now the angular momentum becomes :
Thus it can be seen that angular momentum is independent of the point about which it is measured.
Answer:
The FBD of the given bar is shown below :
Since the bar is in equilibrium, we can write :
or
or .....................................................(i)
For the rotational equilibrium :
(Use equation (i) to solve this equation)
or
Thus the center of gravity is at 0.72 m from the left.
Answer:
The FBD of the car is shown below :
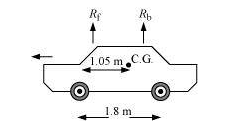
We will use conditions of equilibrium here :
....................................(i)
For rotational equilibrium :
or
..............................(ii)
From (i) and (ii) we get :
and
Thus force exerted by the front wheel is = 3675 N
and force exerted by back wheel = 5145 N.
Answer:
We know that moment of inertia of a sphere about diameter is :
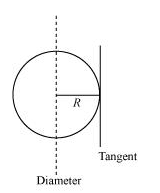 Using parallel axes theorem we can find MI about the tangent.
Using parallel axes theorem we can find MI about the tangent.
Moment of inertia of a sphere about tangent :
Answer:
We know that moment of inertia of a disc about its diameter is :
Using perpendicular axes theorem we can write :
Moment of inertia of disc about its centre:-
Using parallel axes theorem we can find the required MI :
Moment of inertia about an axis normal to the disc and passing through a point on its edge is given by :
Answer:
The moment of inertia of hollow cylinder is given by
And the moment of inertia of solid cylinder is given by :
We know that :
Let the torque for hollow cylinder be and for solid cylinder let it be
.
According to the question :
So we can write the ratio of the angular acceleration of both the objects.
Now for angular velocity,
Clearly, the angular velocity of the solid sphere is more than the angular velocity of the hollow sphere. (As the angular acceleration of solid sphere is greater).
Answer:
Firstly we will calculate moment of inertia of the solid cyliner :
So the kinetic energy is given by :
And the angular momentum is given by :
Answer:
We are given with the initial angular speed and the relation between the moment of inertia of both the cases.
Here we can use conservation of angular momentum as no external force is acting the system.
So we can write :
Answer:
The final and initial velocities are given below :
and
Taking the ratio of both we get,
or
or
Thus the final energy is 2.5 times the initial energy.
The increase in energy is due to the internal energy of the boy.
Answer:
The moment of inertia is given by :
or
And the torque is given by :
Also,
So
And the linear acceleration is
Answer:
The relation between power and torque is given by :
or
Hence the required power is 36 KW.
Answer:
Let the mass per unit area of the disc be .
So total mass is
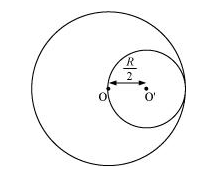
Mass of the smaller disc is given by :
Now since the disc is removed, we can assume that part to have negative mass with respect to the initial condition.
So, the centre of mass of the disc is given by the formula :
or
Hence the centre of mass is shifted leftward from point O.
Q7.17 A metre stick is balanced on a knife edge at its centre. When two coins, each of mass are put one on top of the other at the
mark, the stick is found to be balanced at
. What is the mass of the metre stick?
Answer:
The centre of mass of meter stick is at 50 cm.
Let the mass of meter stick be m.
Now according to the situation given in the question, we will use the rotational equilibrium condition at the centre point of the meter stick.
or
Thus the mass of the meter stick is 66 g.
Q7.18 (a) A solid sphere rolls down two different inclined planes of the same heights but different angles of inclination.
(a) Will it reach the bottom with the same speed in each case?
Answer:
Let the height of the plane is h and mass of the sphere is m.
Let the velocity at the bottom point of incline be v.
So the total energy is given by :
Using the law of conservation of energy :
For solid sphere moment of inertia is :
So,
Put v = wr and solve the above equation.
We obtain :
or
Thus the sphere will reach the bottom at the same speed since it doesn't depend upon the angle of inclination.
(b) Will it take longer to roll down one plane than the other?
Answer:
Let us assume the angle of inclination to be and
.
And the acceleration of the sphere will be and
respectively.
Thus (since
)
Since their acceleration are different so the time taken to roll down the inclined plane will be different in both the cases.
Answer:
The equation of motion gives :
So
Since we know that
So
Hence the inclined plane having a smaller angle of inclination will take more time.
Answer:
Total energy of hoop is given by :
Also the moment inertia of hoop is given by :
We get,
And v = rw
So the work required is :
Answer:
We are given the moment of inertia and the velocity of the molecule.
Let the mass of oxygen molecule be m.
So the mass of each oxygen atom is given by :
Moment of inertia is :
or
or
We are given that :
or
or
or
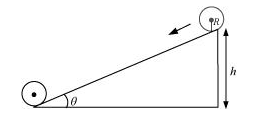
(a) How far will the cylinder go up the plane?
Answer:
The rotational energy is converted into the translational energy.(Law of conservation of energy)
Since the moment of inertia for the cylinder is :
Putting the value of MI and v = wr in the above equation, we get :
or
or
Now using the geometry of the cylinder we can write :
or
or
Thus cylinder will travel up to 3.82 m up the incline.
Q7.21 (b) A solid cylinder rolls up an inclined plane of angle of inclination . At the bottom of the inclined plane the centre of mass of the cylinder has a speed of
.
b) How long will it take to return to the bottom?
Answer:
The velocity of cylinder is given by :
or
We know that for cylinder :
Thus
Required time is :
or
Hence required time is 0.764(2) = 1.53 s.
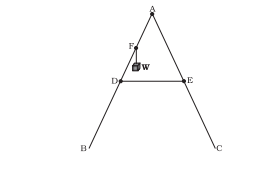
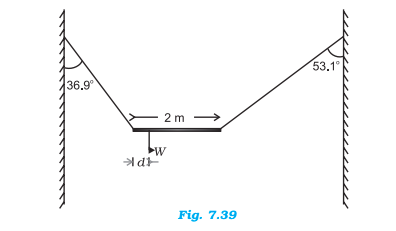
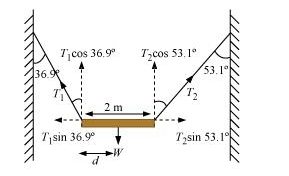
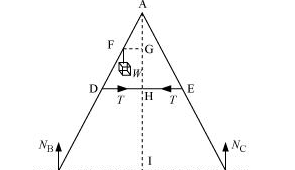
Answer:
The FBD of the figure is shown below :
Consider triangle ADH,
(AD and DH can be found using geometrical analysis.)
Now we will use the equilibrium conditions :
(i) For translational equilibrium :
......................................(i)
(ii) For rotational equilibrium :
or
or ............................................................(ii)
Using (i) and (ii) we get :
and
Now calculate moment about point A :
Solve the equation :
(a) What is his new angular speed? (Neglect friction.)
Answer:
Moment of inertia when hands are stretched :
So the moment of inertia of system (initial ) = 7.6 + 8.1 = 15.7 Kg m 2 .
Now, the moment of inertia when hands are folded :
Thus net final moment of inertia is : = 7.6 + 0.4 = 8 Kg m 2 .
Using conversation of angular momentum we can write :
or
(b) Is kinetic energy conserved in the process? If not, from where does the change come about?
Answer:
No, the kinetic is not constant. The kinetic energy increases with decrease in moment of inertia. The work done by man in folding and stretching hands is responsible for this result.
Answer:
The imparted angular momentum is given by :
Putting all the given values in the above equation we get :
Now, the moment of inertia of door is :
or
Also,
or
(a) What is the angular speed of the two-disc system?
Answer:
Let the moment of inertia of disc I and disc II be I 1 and I 2 respectively.
Similarly, the angular speed of disc I and disc II be w 1 and w 2 respectively.
So the angular momentum can be written as :
and
Thus the total initial angular momentum is :
Now when the two discs are combined the angular momentum is :
Using conservation of angular momentum :
Thus angular velocity is :
(b) Show that the kinetic energy of the combined system is less than the sum of the initial kinetic energies of the two discs. How do you account for this loss in energy? Take .
Answer:
The initial kinetic energy is written as :
or
Now the final kinetic energy is :
Put the value of final angular velocity from part (a).
We need to find :
Solve the above equation, we get :
or
(Since none of the quantity can be negative.)
Thus initial energy is greater than the final energy. (due to frictional force).
Q7.26 (a) Prove the theorem of perpendicular axes.
(Hint: Square of the distance of a point in the
plane from an axis through the origin and perpendicular to the plane is
).
Answer:
Consider the figure given below:
The moment of inertia about x axis is given by :
And the moment of inertia about y-axis is :
Now about z-axis :
or
Answer:
Consider the figure given below :
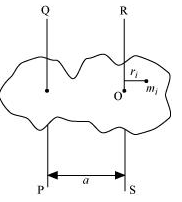 The moment of inertia about RS axis :-
The moment of inertia about RS axis :-
Now the moment of inertia about QP axis :-
or
or
Thus
Hence proved.
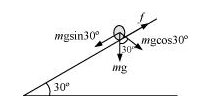
using dynamical consideration (i.e. by consideration of forces and torques). Note is the radius of gyration of the body about its symmetry axis, and
is the radius of the body. The body starts from rest at the top of the plane.
Answer:
Consider the given situation :
The total energy when the object is at the top (potential energy) = mgh.
Energy when the object is at the bottom of the plane :
Put and
, we get :
By the law of conservation of energy we can write :
or
.
Q7.28 A disc rotating about its axis with angular speed is placed lightly (without any translational push) on a perfectly frictionless table. The radius of the disc is
. What are the linear velocities of the points
,
and
on the disc shown in Fig. 7.41? Will the disc roll in the direction indicated?
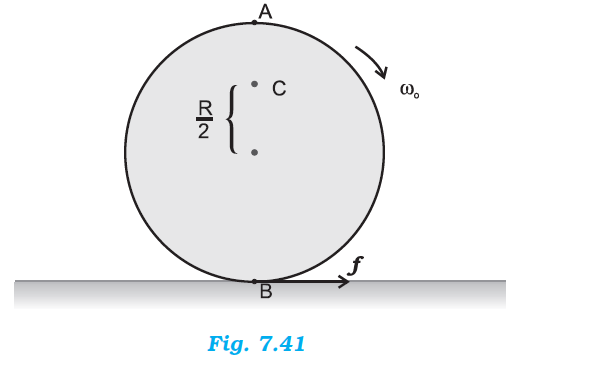 Answer:
Answer:
Let the angular speed of the disc is .
So the linear velocity can be written as
(a) Point A:-
The magnitude of linear velocity is and it is tangentially rightward.
(b) Point B:-
The magnitude linear velocity is and its direction is tangentially leftward.
(c) Point C:-
The magnitude linear velocity is and its direction is rightward.
The disc cannot roll as the table is frictionless.
Q7.29 (a) Explain why friction is necessary to make the disc in Fig. 7.41 roll in the direction indicated
(a) Give the direction of frictional force at , and the sense of frictional torque, before perfect rolling begins.
Answer:
Since the velocity at point B is tangentially leftward so the frictional force will act in the rightward direction.
The sense of frictional torque is perpendicular (outward) to the plane of the disc.
Q7.29 (b) Explain why friction is necessary to make the disc in Fig. 7.41 roll in the direction indicated.
(b) What is the force of friction after perfect rolling begins?
Answer:
Perfect rolling will occur when the velocity of the bottom point (B) will be zero. Thus the frictional force acting will be zero.
Answer:
Friction is the cause for motion here.
So using Newton's law of motion we can write :
or
Now by the equation of motion, we can write :
or
The torque is given by :
or
or
or
Now using the equation of rotational motion we can write :
or
Condition for rolling is
So we can write :
For ring the moment of inertia is :
So we have :
or
Now in case of the disc, the moment of inertia is :
Thus
or
Hence disc will start rolling first.
(a) How much is the force of friction acting on the cylinder?
Answer:
Consider the following figure :
Moment of inertia of cylinder is :
Thus acceleration is given by :
or
Now using Newton's law of motion :
or
or
or
Hence frictional force is 16.3 N.
(b) What is the work done against friction during rolling ?
Answer:
We know that the bottommost point of body (which is in contact with surface) is at rest during rolling. Thus work done against the frictional force is zero.
(c) If the inclination of the plane is increased, at what value of
does the cylinder begin to skid, and not roll perfectly?
Answer:
In case of rolling without any skidding is given by :
Thus
or
or
Q7.32 (a) Read each statement below carefully, and state, with reasons, if it is true or false;
(a) During rolling, the force of friction acts in the same direction as the direction of motion of the of the body.
Answer:
False . Friction also opposes the relative motion between the contacted surfaces. In the case of rolling, the cm is moving in backward direction thus the frictional force is directed in the forward direction.
Q7.32 (b) Read each statement below carefully, and state, with reasons, if it is true or false;
(b) The instantaneous speed of the point of contact during rolling is zero.
Answer:
True. This is because the translational speed is balanced by rotational speed.
Q7.32 (c) Read each statement below carefully, and state, with reasons, if it is true or false;
(c) The instantaneous acceleration of the point of contact during rolling is zero.
Answer:
False. The value of acceleration at contact has some value, it is not zero as the frictional force is zero but the force applied will give some acceleration.
Q7.32 (d) Read each statement below carefully, and state, with reasons, if it is true or false;
(d) For perfect rolling motion, work done against friction is zero.
Answer:
True. As the frictional force at the bottommost point is zero, so the work done against it is also zero.
Q7.32 (e) Read each statement below carefully, and state, with reasons, if it is true or false;
(e) A wheel moving down a perfectly frictionless inclined plane will undergo slipping (not rolling) motion.
Answer:
True. Since it is a frictionless plane so frictional force is zero thus torque is not generated. This results in slipping not rolling.
(a) Show
where is the momentum of the ith particle (of mass
)and
Note
is the velocity
of the ith particle relative to the centre of mass.Also, prove using the definition of the centre of mass
Answer:
The momentum of i th particle is given by :
The velocity of the centre of mass is V.
Then the velocity of ith particle with respect to the center of mass will be :
Now multiply the mass of the particle to both the sides, we get :
or (Here p' i is the momentum of ith particle with respect to center of mass.)
or
Now consider :
But as per the definition of centre of mass, we know that :
Thus
(b) show where
is the total kinetic energy of the system of particles,
is the total kinetic energy of the
system when the particle velocities are taken with respect to the centre of mass and is the kinetic energy of the translation of the system as a whole (i.e. of the centre of mass motion of the system). The result has been used in Sec. 7.14.
Answer:
From the first part we can write :
or
Squaring both sides (in vector form taking dot products with itself), we get :
or
or
Hence
(c) Show
where
is the angular momentum of the system about the centre of mass with velocities taken relative to the centre of mass. Remember ; rest of the notation is the standard notation used in the chapter. Note
and
can be said to be angular momenta, respectively, about and of the centre of mass of the system of particles.
Answer:
The position vector of the ith particle (with respect to the centre of mass) is given by :
or
From the first case we can write :
Taking cross product with position vector we get ;
or
or
7.33 (d) Separation of Motion of a system of particles into motion of the centre of mass and motion about the centre of mass :
(d) Show
Further, show that
where is the sum of all external torques acting on the system about the centre of mass.
(Hint: Use the definition of centre of mass and third law of motion. Assume the
internal forces between any two particles act along the line joining the particles.)
Answer:
Since we know that :
Differentiating the equation with respect to time, we obtain :
or
or
Now using Newton's law of motion we can write :
Thus
Chapter 7 of NCERT Physics Solutions consists of a total of thirty-three questions. Questions 22-33 belong to the additional exercise section. The solutions provided in the NCERT Solutions are explained step by step and are easy to understand. Students can also download the solutions in PDF format and use them according to their convenience. It is always advisable to attempt the problems on their own first and then refer to the solutions provided to check their understanding and identify areas of improvement.
Chapter 1 | |
Chapter 2 | |
Chapter 3 | |
Chapter 4 | |
Chapter 5 | |
Chapter 6 | |
Chapter 7 | System of Particles and Rotational motion |
Chapter 8 | |
Chapter 9 | |
Chapter 10 | |
Chapter 11 | |
Chapter 12 | |
Chapter 13 | |
Chapter 14 | |
Chapter 15 |
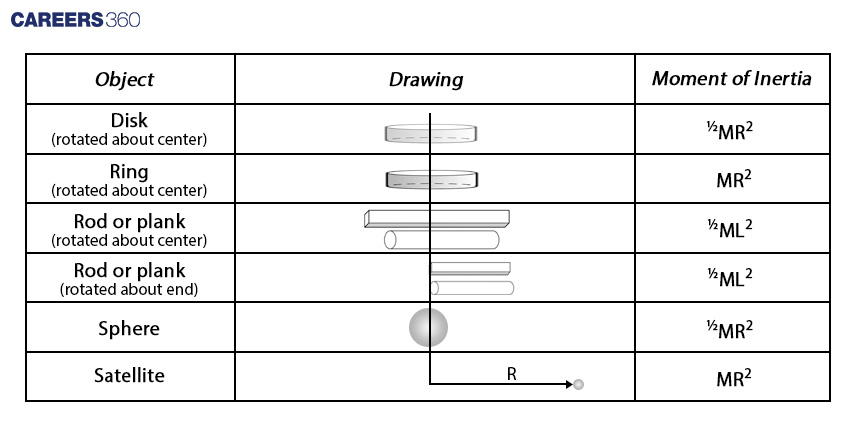
Get a grip on Physics with our helpful class 11 physics chapter 7 exercise solutions. They come with important formulas (provided below), easy-to-understand diagrams, and a useful eBook link. Boost your understanding of the System of Particles and Rotational Motion and do great in chapter 7 physics class 11 numericals.
![]()
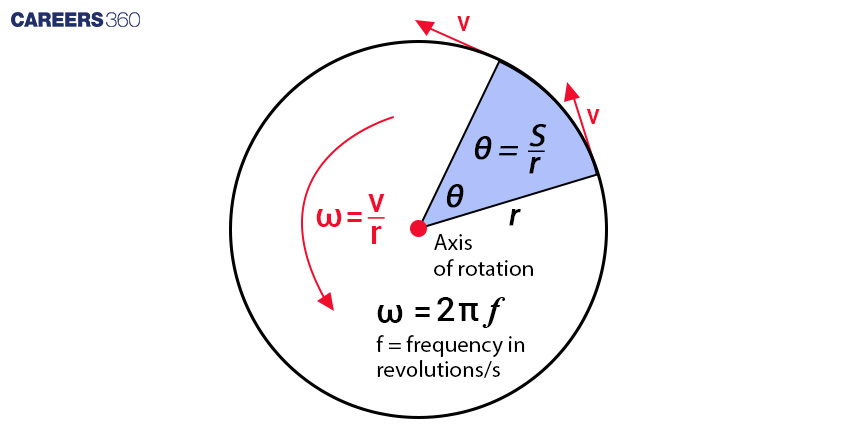
Average angular velocity =∆θ/∆t
Instantaneous angular velocity, ω=dθ/dt
Careers360 official website offers PDF format of System of particles and rotational motion ncert solutions from the NCERT textbook. rotational motion class 11 ncert solutions are well-crafted, taking into account your understanding and proficiency, and can aid you in achieving high scores on exams.
Physics class 11 chapter 7 NCERT solutions system of particles and rotational motion are designed for comprehensive learning.
ch 7 class 11 physics physics solutions are concise and well-explained, ensuring that students can understand them easily.
All the essential aspects of the physics class 11 chapter 7 are covered in these solutions.
chapter 7 physics class 11 ncert solutions are presented in very friendly manner, making them easy to read and remember.
These ncert solutions for class 11 physics chapter 7 pdf can help students score good marks in board exams as well as competitive exams like JEE or NEET.
ncert solutions for class 11 physics chapter 7 are an excellent resource for exam preparation. Students can download the PDF version of these solutions quickly.
Overall, the system of particles class 11 NCERT solutions can help students master the entire chapter with ease.
NCERT Physics Exemplar Solutions Class 11 For All The Chapters:
For NEET exam around 5% of questions are asked from the chapter system of particles and rotational motion. NEET questions can be practiced refering the previous papers of NEET. For more number of questions refer to NCERT exemplar questions for Rotational Motion.
2 questions can be expected from System of Particles and Rotational motion for JEE Main exam. Oscillation and Waves is one of the important topics for exams like KVPY, NSEP and JEE Main
To answer difficult questions regarding Chapter 7 of NCERT Solutions for Class 11 Physics, it's essential to carefully read the question, review relevant concepts, break down the question, apply concepts, check your answer, and seek help if needed.
The System of Particles and Rotational Motion is the 7th chapter in the Class 11 Physics textbook of NCERT Solutions.
To convert revolutions per minute (rev/min) to radians per second (rad/s), you can use the following formula:
angular velocity (ω) in rad/s = (2π × n)/60
where n is the angular velocity in revolutions per minute.
So, to convert rev/min to rad/s, multiply the angular velocity in revolutions per minute by 2π/60.
For example, if the angular velocity is given as 100 rev/min, then we can calculate it in radians per second as:
ω = (2π × 100)/60 = 10.47 rad/s
Therefore, the angular velocity in radians per second is 10.47 rad/s.
A block of mass 0.50 kg is moving with a speed of 2.00 ms-1 on a smooth surface. It strikes another mass of 1.00 kg and then they move together as a single body. The energy loss during the collision is
| Option 1)
|
Option 2)
|
| Option 3)
|
Option 4)
|
An athlete in the olympic games covers a distance of 100 m in 10 s. His kinetic energy can be estimated to be in the range
| Option 1)
|
Option 2)
|
| Option 3)
|
Option 4)
|
A particle is projected at 600 to the horizontal with a kinetic energy . The kinetic energy at the highest point
| Option 1)
|
Option 2)
|
| Option 3)
|
Option 4)
|
In the reaction,
| Option 1)
|
Option 2)
|
| Option 3)
|
Option 4)
|
How many moles of magnesium phosphate, will contain 0.25 mole of oxygen atoms?
| Option 1)
0.02 |
Option 2)
3.125 × 10-2 |
| Option 3)
1.25 × 10-2 |
Option 4)
2.5 × 10-2 |
Database professionals use software to store and organise data such as financial information, and customer shipping records. Individuals who opt for a career as data administrators ensure that data is available for users and secured from unauthorised sales. DB administrators may work in various types of industries. It may involve computer systems design, service firms, insurance companies, banks and hospitals.
The field of biomedical engineering opens up a universe of expert chances. An Individual in the biomedical engineering career path work in the field of engineering as well as medicine, in order to find out solutions to common problems of the two fields. The biomedical engineering job opportunities are to collaborate with doctors and researchers to develop medical systems, equipment, or devices that can solve clinical problems. Here we will be discussing jobs after biomedical engineering, how to get a job in biomedical engineering, biomedical engineering scope, and salary.
A career as ethical hacker involves various challenges and provides lucrative opportunities in the digital era where every giant business and startup owns its cyberspace on the world wide web. Individuals in the ethical hacker career path try to find the vulnerabilities in the cyber system to get its authority. If he or she succeeds in it then he or she gets its illegal authority. Individuals in the ethical hacker career path then steal information or delete the file that could affect the business, functioning, or services of the organization.
GIS officer work on various GIS software to conduct a study and gather spatial and non-spatial information. GIS experts update the GIS data and maintain it. The databases include aerial or satellite imagery, latitudinal and longitudinal coordinates, and manually digitized images of maps. In a career as GIS expert, one is responsible for creating online and mobile maps.
The invention of the database has given fresh breath to the people involved in the data analytics career path. Analysis refers to splitting up a whole into its individual components for individual analysis. Data analysis is a method through which raw data are processed and transformed into information that would be beneficial for user strategic thinking.
Data are collected and examined to respond to questions, evaluate hypotheses or contradict theories. It is a tool for analyzing, transforming, modeling, and arranging data with useful knowledge, to assist in decision-making and methods, encompassing various strategies, and is used in different fields of business, research, and social science.
Individuals who opt for a career as geothermal engineers are the professionals involved in the processing of geothermal energy. The responsibilities of geothermal engineers may vary depending on the workplace location. Those who work in fields design facilities to process and distribute geothermal energy. They oversee the functioning of machinery used in the field.
If you are intrigued by the programming world and are interested in developing communications networks then a career as database architect may be a good option for you. Data architect roles and responsibilities include building design models for data communication networks. Wide Area Networks (WANs), local area networks (LANs), and intranets are included in the database networks. It is expected that database architects will have in-depth knowledge of a company's business to develop a network to fulfil the requirements of the organisation. Stay tuned as we look at the larger picture and give you more information on what is db architecture, why you should pursue database architecture, what to expect from such a degree and what your job opportunities will be after graduation. Here, we will be discussing how to become a data architect. Students can visit NIT Trichy, IIT Kharagpur, JMI New Delhi.
Individuals who opt for a career as a remote sensing technician possess unique personalities. Remote sensing analysts seem to be rational human beings, they are strong, independent, persistent, sincere, realistic and resourceful. Some of them are analytical as well, which means they are intelligent, introspective and inquisitive.
Remote sensing scientists use remote sensing technology to support scientists in fields such as community planning, flight planning or the management of natural resources. Analysing data collected from aircraft, satellites or ground-based platforms using statistical analysis software, image analysis software or Geographic Information Systems (GIS) is a significant part of their work. Do you want to learn how to become remote sensing technician? There's no need to be concerned; we've devised a simple remote sensing technician career path for you. Scroll through the pages and read.
Budget analysis, in a nutshell, entails thoroughly analyzing the details of a financial budget. The budget analysis aims to better understand and manage revenue. Budget analysts assist in the achievement of financial targets, the preservation of profitability, and the pursuit of long-term growth for a business. Budget analysts generally have a bachelor's degree in accounting, finance, economics, or a closely related field. Knowledge of Financial Management is of prime importance in this career.
The invention of the database has given fresh breath to the people involved in the data analytics career path. Analysis refers to splitting up a whole into its individual components for individual analysis. Data analysis is a method through which raw data are processed and transformed into information that would be beneficial for user strategic thinking.
Data are collected and examined to respond to questions, evaluate hypotheses or contradict theories. It is a tool for analyzing, transforming, modeling, and arranging data with useful knowledge, to assist in decision-making and methods, encompassing various strategies, and is used in different fields of business, research, and social science.
An underwriter is a person who assesses and evaluates the risk of insurance in his or her field like mortgage, loan, health policy, investment, and so on and so forth. The underwriter career path does involve risks as analysing the risks means finding out if there is a way for the insurance underwriter jobs to recover the money from its clients. If the risk turns out to be too much for the company then in the future it is an underwriter who will be held accountable for it. Therefore, one must carry out his or her job with a lot of attention and diligence.
A Product Manager is a professional responsible for product planning and marketing. He or she manages the product throughout the Product Life Cycle, gathering and prioritising the product. A product manager job description includes defining the product vision and working closely with team members of other departments to deliver winning products.
Individuals in the operations manager jobs are responsible for ensuring the efficiency of each department to acquire its optimal goal. They plan the use of resources and distribution of materials. The operations manager's job description includes managing budgets, negotiating contracts, and performing administrative tasks.
Individuals who opt for a career as a stock analyst examine the company's investments makes decisions and keep track of financial securities. The nature of such investments will differ from one business to the next. Individuals in the stock analyst career use data mining to forecast a company's profits and revenues, advise clients on whether to buy or sell, participate in seminars, and discussing financial matters with executives and evaluate annual reports.
A Researcher is a professional who is responsible for collecting data and information by reviewing the literature and conducting experiments and surveys. He or she uses various methodological processes to provide accurate data and information that is utilised by academicians and other industry professionals. Here, we will discuss what is a researcher, the researcher's salary, types of researchers.
Welding Engineer Job Description: A Welding Engineer work involves managing welding projects and supervising welding teams. He or she is responsible for reviewing welding procedures, processes and documentation. A career as Welding Engineer involves conducting failure analyses and causes on welding issues.
A career as Transportation Planner requires technical application of science and technology in engineering, particularly the concepts, equipment and technologies involved in the production of products and services. In fields like land use, infrastructure review, ecological standards and street design, he or she considers issues of health, environment and performance. A Transportation Planner assigns resources for implementing and designing programmes. He or she is responsible for assessing needs, preparing plans and forecasts and compliance with regulations.
Individuals who opt for a career as an environmental engineer are construction professionals who utilise the skills and knowledge of biology, soil science, chemistry and the concept of engineering to design and develop projects that serve as solutions to various environmental problems.
A Safety Manager is a professional responsible for employee’s safety at work. He or she plans, implements and oversees the company’s employee safety. A Safety Manager ensures compliance and adherence to Occupational Health and Safety (OHS) guidelines.
A Conservation Architect is a professional responsible for conserving and restoring buildings or monuments having a historic value. He or she applies techniques to document and stabilise the object’s state without any further damage. A Conservation Architect restores the monuments and heritage buildings to bring them back to their original state.
A Structural Engineer designs buildings, bridges, and other related structures. He or she analyzes the structures and makes sure the structures are strong enough to be used by the people. A career as a Structural Engineer requires working in the construction process. It comes under the civil engineering discipline. A Structure Engineer creates structural models with the help of computer-aided design software.
Highway Engineer Job Description: A Highway Engineer is a civil engineer who specialises in planning and building thousands of miles of roads that support connectivity and allow transportation across the country. He or she ensures that traffic management schemes are effectively planned concerning economic sustainability and successful implementation.
Are you searching for a Field Surveyor Job Description? A Field Surveyor is a professional responsible for conducting field surveys for various places or geographical conditions. He or she collects the required data and information as per the instructions given by senior officials.
Orthotists and Prosthetists are professionals who provide aid to patients with disabilities. They fix them to artificial limbs (prosthetics) and help them to regain stability. There are times when people lose their limbs in an accident. In some other occasions, they are born without a limb or orthopaedic impairment. Orthotists and prosthetists play a crucial role in their lives with fixing them to assistive devices and provide mobility.
A career in pathology in India is filled with several responsibilities as it is a medical branch and affects human lives. The demand for pathologists has been increasing over the past few years as people are getting more aware of different diseases. Not only that, but an increase in population and lifestyle changes have also contributed to the increase in a pathologist’s demand. The pathology careers provide an extremely huge number of opportunities and if you want to be a part of the medical field you can consider being a pathologist. If you want to know more about a career in pathology in India then continue reading this article.
Gynaecology can be defined as the study of the female body. The job outlook for gynaecology is excellent since there is evergreen demand for one because of their responsibility of dealing with not only women’s health but also fertility and pregnancy issues. Although most women prefer to have a women obstetrician gynaecologist as their doctor, men also explore a career as a gynaecologist and there are ample amounts of male doctors in the field who are gynaecologists and aid women during delivery and childbirth.
The audiologist career involves audiology professionals who are responsible to treat hearing loss and proactively preventing the relevant damage. Individuals who opt for a career as an audiologist use various testing strategies with the aim to determine if someone has a normal sensitivity to sounds or not. After the identification of hearing loss, a hearing doctor is required to determine which sections of the hearing are affected, to what extent they are affected, and where the wound causing the hearing loss is found. As soon as the hearing loss is identified, the patients are provided with recommendations for interventions and rehabilitation such as hearing aids, cochlear implants, and appropriate medical referrals. While audiology is a branch of science that studies and researches hearing, balance, and related disorders.
An oncologist is a specialised doctor responsible for providing medical care to patients diagnosed with cancer. He or she uses several therapies to control the cancer and its effect on the human body such as chemotherapy, immunotherapy, radiation therapy and biopsy. An oncologist designs a treatment plan based on a pathology report after diagnosing the type of cancer and where it is spreading inside the body.
Are you searching for an ‘Anatomist job description’? An Anatomist is a research professional who applies the laws of biological science to determine the ability of bodies of various living organisms including animals and humans to regenerate the damaged or destroyed organs. If you want to know what does an anatomist do, then read the entire article, where we will answer all your questions.
For an individual who opts for a career as an actor, the primary responsibility is to completely speak to the character he or she is playing and to persuade the crowd that the character is genuine by connecting with them and bringing them into the story. This applies to significant roles and littler parts, as all roles join to make an effective creation. Here in this article, we will discuss how to become an actor in India, actor exams, actor salary in India, and actor jobs.
Individuals who opt for a career as acrobats create and direct original routines for themselves, in addition to developing interpretations of existing routines. The work of circus acrobats can be seen in a variety of performance settings, including circus, reality shows, sports events like the Olympics, movies and commercials. Individuals who opt for a career as acrobats must be prepared to face rejections and intermittent periods of work. The creativity of acrobats may extend to other aspects of the performance. For example, acrobats in the circus may work with gym trainers, celebrities or collaborate with other professionals to enhance such performance elements as costume and or maybe at the teaching end of the career.
Career as a video game designer is filled with excitement as well as responsibilities. A video game designer is someone who is involved in the process of creating a game from day one. He or she is responsible for fulfilling duties like designing the character of the game, the several levels involved, plot, art and similar other elements. Individuals who opt for a career as a video game designer may also write the codes for the game using different programming languages.
Depending on the video game designer job description and experience they may also have to lead a team and do the early testing of the game in order to suggest changes and find loopholes.
Radio Jockey is an exciting, promising career and a great challenge for music lovers. If you are really interested in a career as radio jockey, then it is very important for an RJ to have an automatic, fun, and friendly personality. If you want to get a job done in this field, a strong command of the language and a good voice are always good things. Apart from this, in order to be a good radio jockey, you will also listen to good radio jockeys so that you can understand their style and later make your own by practicing.
A career as radio jockey has a lot to offer to deserving candidates. If you want to know more about a career as radio jockey, and how to become a radio jockey then continue reading the article.
The word “choreography" actually comes from Greek words that mean “dance writing." Individuals who opt for a career as a choreographer create and direct original dances, in addition to developing interpretations of existing dances. A Choreographer dances and utilises his or her creativity in other aspects of dance performance. For example, he or she may work with the music director to select music or collaborate with other famous choreographers to enhance such performance elements as lighting, costume and set design.
A career as social media manager involves implementing the company’s or brand’s marketing plan across all social media channels. Social media managers help in building or improving a brand’s or a company’s website traffic, build brand awareness, create and implement marketing and brand strategy. Social media managers are key to important social communication as well.
Photography is considered both a science and an art, an artistic means of expression in which the camera replaces the pen. In a career as a photographer, an individual is hired to capture the moments of public and private events, such as press conferences or weddings, or may also work inside a studio, where people go to get their picture clicked. Photography is divided into many streams each generating numerous career opportunities in photography. With the boom in advertising, media, and the fashion industry, photography has emerged as a lucrative and thrilling career option for many Indian youths.
An individual who is pursuing a career as a producer is responsible for managing the business aspects of production. They are involved in each aspect of production from its inception to deception. Famous movie producers review the script, recommend changes and visualise the story.
They are responsible for overseeing the finance involved in the project and distributing the film for broadcasting on various platforms. A career as a producer is quite fulfilling as well as exhaustive in terms of playing different roles in order for a production to be successful. Famous movie producers are responsible for hiring creative and technical personnel on contract basis.
In a career as a copywriter, one has to consult with the client and understand the brief well. A career as a copywriter has a lot to offer to deserving candidates. Several new mediums of advertising are opening therefore making it a lucrative career choice. Students can pursue various copywriter courses such as Journalism, Advertising, Marketing Management. Here, we have discussed how to become a freelance copywriter, copywriter career path, how to become a copywriter in India, and copywriting career outlook.
In a career as a vlogger, one generally works for himself or herself. However, once an individual has gained viewership there are several brands and companies that approach them for paid collaboration. It is one of those fields where an individual can earn well while following his or her passion.
Ever since internet costs got reduced the viewership for these types of content has increased on a large scale. Therefore, a career as a vlogger has a lot to offer. If you want to know more about the Vlogger eligibility, roles and responsibilities then continue reading the article.
For publishing books, newspapers, magazines and digital material, editorial and commercial strategies are set by publishers. Individuals in publishing career paths make choices about the markets their businesses will reach and the type of content that their audience will be served. Individuals in book publisher careers collaborate with editorial staff, designers, authors, and freelance contributors who develop and manage the creation of content.
Careers in journalism are filled with excitement as well as responsibilities. One cannot afford to miss out on the details. As it is the small details that provide insights into a story. Depending on those insights a journalist goes about writing a news article. A journalism career can be stressful at times but if you are someone who is passionate about it then it is the right choice for you. If you want to know more about the media field and journalist career then continue reading this article.
Individuals in the editor career path is an unsung hero of the news industry who polishes the language of the news stories provided by stringers, reporters, copywriters and content writers and also news agencies. Individuals who opt for a career as an editor make it more persuasive, concise and clear for readers. In this article, we will discuss the details of the editor's career path such as how to become an editor in India, editor salary in India and editor skills and qualities.
Individuals who opt for a career as a reporter may often be at work on national holidays and festivities. He or she pitches various story ideas and covers news stories in risky situations. Students can pursue a BMC (Bachelor of Mass Communication), B.M.M. (Bachelor of Mass Media), or MAJMC (MA in Journalism and Mass Communication) to become a reporter. While we sit at home reporters travel to locations to collect information that carries a news value.
Are you searching for a Corporate Executive job description? A Corporate Executive role comes with administrative duties. He or she provides support to the leadership of the organisation. A Corporate Executive fulfils the business purpose and ensures its financial stability. In this article, we are going to discuss how to become corporate executive.
A multimedia specialist is a media professional who creates, audio, videos, graphic image files, computer animations for multimedia applications. He or she is responsible for planning, producing, and maintaining websites and applications.
Welding Engineer Job Description: A Welding Engineer work involves managing welding projects and supervising welding teams. He or she is responsible for reviewing welding procedures, processes and documentation. A career as Welding Engineer involves conducting failure analyses and causes on welding issues.
A quality controller plays a crucial role in an organisation. He or she is responsible for performing quality checks on manufactured products. He or she identifies the defects in a product and rejects the product.
A quality controller records detailed information about products with defects and sends it to the supervisor or plant manager to take necessary actions to improve the production process.
A Product Manager is a professional responsible for product planning and marketing. He or she manages the product throughout the Product Life Cycle, gathering and prioritising the product. A product manager job description includes defining the product vision and working closely with team members of other departments to deliver winning products.
A QA Lead is in charge of the QA Team. The role of QA Lead comes with the responsibility of assessing services and products in order to determine that he or she meets the quality standards. He or she develops, implements and manages test plans.
A Structural Engineer designs buildings, bridges, and other related structures. He or she analyzes the structures and makes sure the structures are strong enough to be used by the people. A career as a Structural Engineer requires working in the construction process. It comes under the civil engineering discipline. A Structure Engineer creates structural models with the help of computer-aided design software.
The Process Development Engineers design, implement, manufacture, mine, and other production systems using technical knowledge and expertise in the industry. They use computer modeling software to test technologies and machinery. An individual who is opting career as Process Development Engineer is responsible for developing cost-effective and efficient processes. They also monitor the production process and ensure it functions smoothly and efficiently.
An AWS Solution Architect is someone who specializes in developing and implementing cloud computing systems. He or she has a good understanding of the various aspects of cloud computing and can confidently deploy and manage their systems. He or she troubleshoots the issues and evaluates the risk from the third party.
An Azure Administrator is a professional responsible for implementing, monitoring, and maintaining Azure Solutions. He or she manages cloud infrastructure service instances and various cloud servers as well as sets up public and private cloud systems.
Careers in computer programming primarily refer to the systematic act of writing code and moreover include wider computer science areas. The word 'programmer' or 'coder' has entered into practice with the growing number of newly self-taught tech enthusiasts. Computer programming careers involve the use of designs created by software developers and engineers and transforming them into commands that can be implemented by computers. These commands result in regular usage of social media sites, word-processing applications and browsers.
A Product Manager is a professional responsible for product planning and marketing. He or she manages the product throughout the Product Life Cycle, gathering and prioritising the product. A product manager job description includes defining the product vision and working closely with team members of other departments to deliver winning products.
Individuals in the information security manager career path involves in overseeing and controlling all aspects of computer security. The IT security manager job description includes planning and carrying out security measures to protect the business data and information from corruption, theft, unauthorised access, and deliberate attack
An Automation Test Engineer job involves executing automated test scripts. He or she identifies the project’s problems and troubleshoots them. The role involves documenting the defect using management tools. He or she works with the application team in order to resolve any issues arising during the testing process.
Get up to 90% scholarship on NEET, JEE & Foundation courses

As per latest 2024 syllabus. Chemistry formulas, equations, & laws of class 11 & 12th chapters
Enrol in PACE IIT & Medical, Financial District, Hyd for JEE/NEET preparation
Start your JEE preparation with ALLEN
Ace your NEET preparation with ALLEN Online Programs
Registeration closing on 19th Apr for SAT® | One Test-Many Universities | 90% discount on registrations fee | Free Practice | Multiple Attempts | no penalty for guessing
Regular exam updates, QnA, Predictors, College Applications & E-books now on your Mobile
Students
Colleges
Exams
E-Books
Cetifications
